
fucking fuck. was für ein bug, den unser dreame x50 ultra jetzt auch erwischt hat. weil es glaubt ständig am abgrund zu stehen, dreht und windet sich der roboter im kreis und rückwärts und steht irgendwann veränstigt in der ecke. mit klebeband über den beiden vorderen cliff-sensoren ist er wieder der alte: immer noch ziemlich orientierungslos, aber er kommt klar mit unserer wohnung.

der baum jetzt mit zaun


heute mal mit selfie mit hund und krähe.
@tomth@wien.rocks sehr unterschiedlich. in den letzten 6 monaten hab ich homeassistant mehr oder weniger allein gelassen, ausser mich gelegentlich um lifecycle gedöns zu kümmern. das grundrauschen (batteriewechsel, kleine probleme beheben) ist dann nicht mehr als 1-2 stunden pro woche.
aber grössere updates mit breaking changes, umbauten (wie den zigbee-coordinator zu wechseln kürzlich) oder neue schnapsideen, können den wochenaufwand dann auch schnell mal auf 10 bis 20 stunden steigen lassen.
ich bewundere die konsistenz mit der @Buddenbohm@fnordon.de und @kaltmamsell@fnordon.de regelmässig morgens zwischen 6 und 7 uhr posten. und gelegentlich schaffe ich es mit ihnen eine art trinität zu bilden, jedenfalls laut meiner mastodon startseite.
heute ist im fuss dieser webseite der satz
hier schreibt felix schwenzel seit 24 jahren gerne ins internet (eigentlich seit 30 jahren).
von 23 auf 24, bzw. 29 auf 30 umgesprungen, weil der erste artikel den ich hier veröffentlicht habe vom 20.04.2002 ist. mir sind diese jahrestage eigentlich nicht wichtig, aber statistiken mag ich gerne. deshalb betätige ich mich mal eben als statistik-chronist.
wahrscheinlich wäre es mittlerweile besser, unten hinzuschreiben, dass ich jetzt schon „sehr lange“ ins internet schreibe. bei solchen zeiträumen ist der genaue tag dann auch irgendwann egal, so wie mir die kalendarischen koordinaten meiner geburtstage nach fast 60 jahren mittlerweile auch egal sind.
kirby nutze ich jetzt auch bereits seit über einem jahr („hallo kirby“). ich bereue den umstieg nicht, im gegenteil, kirby ist mir jeden tag erneut eine grosse freude.
was ich jetzt auch seit fast einem jahr mache: jeden tag etwas veröffentlichen. der streak ist mittlerweile 359 tage lang. die anzahl-der-posts-übersichtgrafik auf der rückseite ist mittlerweile ohne schwarze punkte.
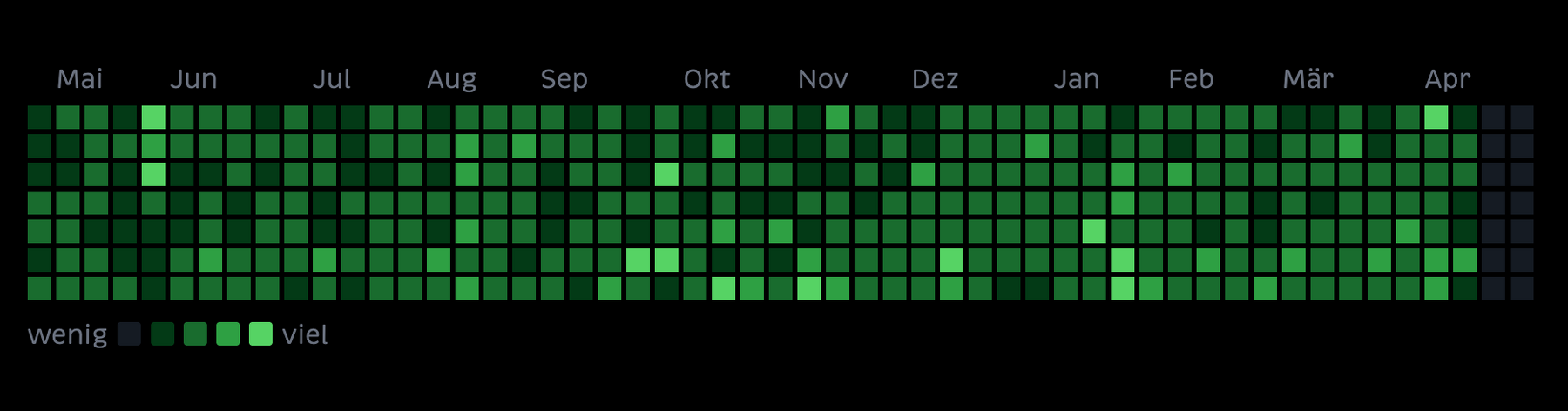
bemerkenswert an der grafik ist eigentlich nichts, ausser dass man kaum muster erkennen kann wie und wann ich wie viel veröffentliche. man erkennt allerdings ein cluster zwischen mai und juni: republica. so erkennt man: noch vier wochen bis zu #rp26. das minimalistische design dieses jahr gefällt mir sehr gut, hier meine „speaker-seite“ für dieses jahr. ende der durchsage.






{kind=link}
{kind=link}